クソ暑いのと感染リスク低減を踏まえ、自宅で散髪する事に(^^;
通販でバリカンを購入。
#折角、国内家電メーカ製を選んだのに、届いたらMade in Chinaだった(--;
#もう少し高いのにしたら、国内製だったのかな?
ま、ともあれ、説明書通りに一晩充電してから、注油して初使用。
下の方は6mmで刈上げ、上の方は12mm。トップはハサミで切ってもらった。
初めてにしてはなかなかいい感じです。
当分、これでしのぐかなぁ。

$ sudo su
# vifs
#
# Warning - this file should only be modified with vifs(8)
#
# Failure to do so is unsupported and may be destructive.
#
UUID=BA80B0B6-B49B-47A4-8C9F-XXXXXXXXXXXX /Users/shibata apfs rw,auto
駄目元でCatalinaにしてみた(^^;
1.まずはTime Machineでバックアップをとる。
事前にできるだけ不要なファイルは消しておく。
2.macOS Catalina Patcherをダウンロードし、
手持ちのUSBメモリをインストールメディアにする。
3.手順通りにmacos Patcherで作成したインストールメディアで起動させ、
内蔵HDDにCatalinaをインストールする。
#と、スンナリいっているいるように書いているが、postinstallのpatchが失敗して
#駄目元で内蔵HDDからCatalinaを起動させた後にpostinstallを行なった。
#Catalinaの起動も30分ぐらいかかり、けっこう待たされた。
4.内蔵HDDからCatalina起動後、もう一度インストールメディアで起動して
postinstall patchを実行する。
5.日本語入力がおかしくなるので、MojaveのIMEを移植する。
6.再起動すれば、出来上がり。
肝は上記の5である。
ネットを探すと、macOS Catalina Patcher 不具合情報と解決策という、ありがたいサイトがあった。
もう一台のmacをたまたまMojaveで動かしていたので、そちらから関係するファイルを持ってきた。
下記の青文字がMojaveから移植したファイル。
同じく赤文字はCatalinaにあったファイルのバックアップ。
sh-3.2# pwd
/usr/lib
sh-3.2# ls -l libmecab*
-rwxr-xr-x@ 1 root wheel 1596512 8 9 18:07 libmecab.1.0.0.dylib
-rwxr-xr-x@ 1 root wheel 1596512 8 9 18:07 libmecab.dylib
-rwxr-xr-x 1 root wheel 812464 8 6 09:49 libmecab.dylib.bak
-rwxr-xr-x@ 1 root wheel 4820080 8 9 18:07 libmecabra.dylib
-rwxr-xr-x 1 root wheel 2881600 8 6 09:50 libmecabra.dylib.bak
sh-3.2# pwd
/System/Library/Input Methods
sh-3.2# ls -l JapaneseIM.*
JapaneseIM.app:
total 0
drwxr-xr-x@ 9 root wheel 288 2 23 2019 Contents
JapaneseIM.bak:
total 0
drwxr-xr-x 9 root wheel 288 6 6 15:27 Contents
sh-3.2# pwd
/System/Library/PrivateFrameworks
sh-3.2# ls TextInput*
TextInput.framework:
Resources TextInput Versions
TextInput.framework.bak:
LanguageIntelligenceTrialDefaults.pb TextInput
Resources Versions
TextInputCore.framework:
Resources TextInputCore Versions
TextInputCore.framework.bak:
Resources TextInputCore Versions
TextInputMenuUI.framework:
Resources TextInputMenuUI Versions
mongodb connector for business intelligence
って、mongodbをODBCぽいSQL-DBに見せかけるラッパーかな。
https://www.mongodb.com/products/bi-connector
https://docs.mongodb.com/bi-connector/master/
絶不調のでお蔵入りにしていたRaspberry Pi 3B+だが、捨てるには惜しいので、不安定なμSDカードをできるだけ使わない方法で安定するかどうかを検証すべく、以下を行なった。
【USB経由でSDカードを使う】
何も設定しなくても、RP3B+は標準でUSBブートするようで、上記はあっさり動いた。
上記でも以前より安定して動いたような気がする。
しかし、もう一歩進めて、下記のようにした。
【USB経由で/bootさせ、/パーティションはnfsでマウントする】
次にやるかもしれないのは、下記。
【PXEブートを使い、tftpで/bootをマウントさせ、/はnfsでマウント】
これができたら、不安定なSDから完全におさらばできる。
それらしい情報は下記にあるので、不安定さが解決しな時には試してみよう。
Raspberry Pi 3 でSDカードなしのネットワークブートをする
以上(^^;
{ key: value }
{ key: value }{ key: value }
[{ key: value }{ key: value }]
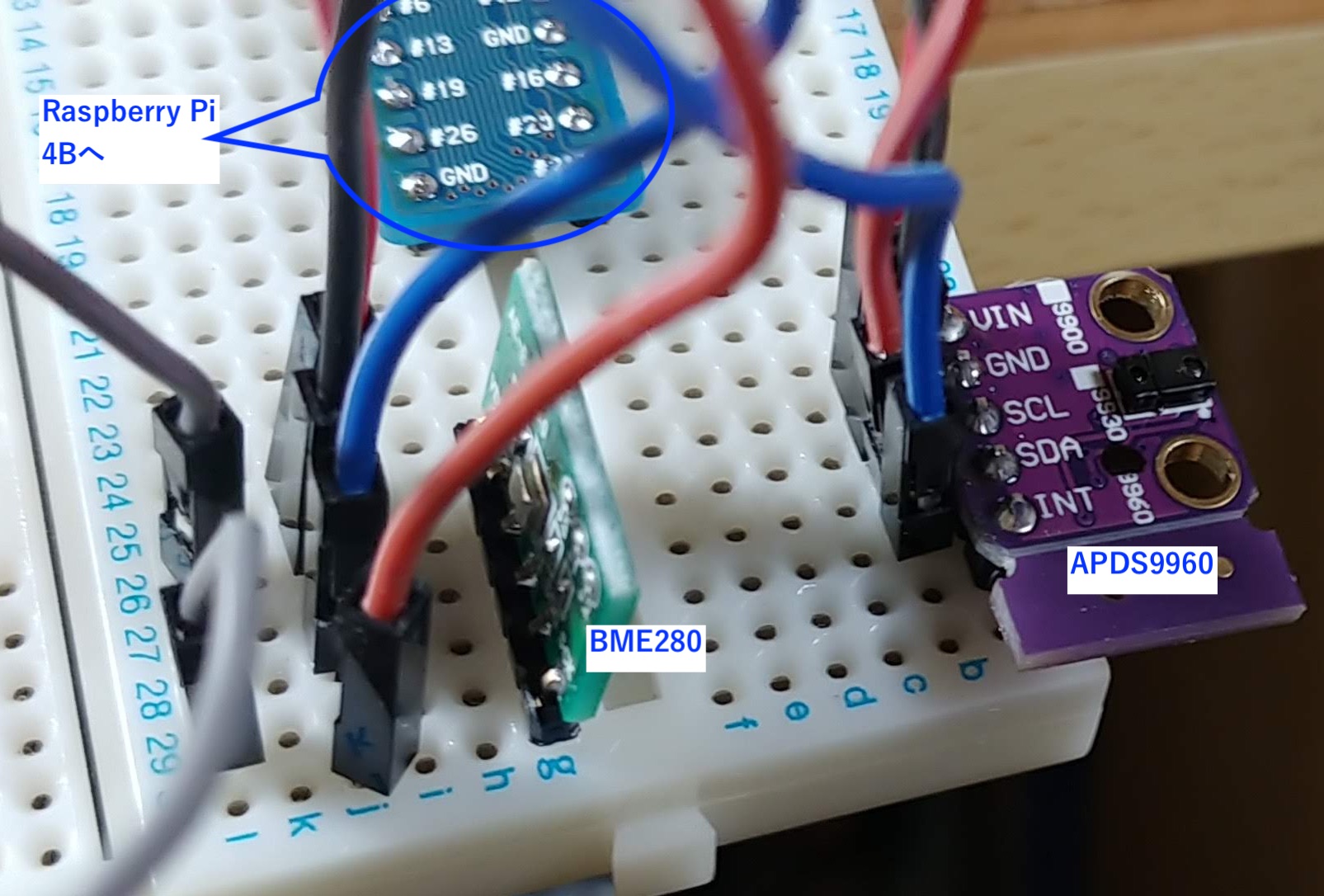
Raspberry Pi 4B + APDS9660使用光学式ジェスチャーセンサモジュールキット の続き。
【お品書き】
温度、湿度、大気圧のセンサが一つに入っているBME280のモジュールであるBME280使用 温湿度・気圧センサモジュールキットをi2cでラズパイに接続し、ログ取得するもの。
【準備】
スイッチサイエンスの販売サイトにGithubの公開リポジトリ(Pythonスクリプトなど)へのリンクがあったので、それを利用することにした。
#python2向けだったので、少し手直しが必要だったけど。
【スクリプト】his.env2.py
[code]
#!/usr/bin/python3
#coding: utf-8
from smbus import SMBus
import datetime
import time
bus_number = 1
i2c_address = 0x76
bus = SMBus(bus_number)
path = '/sys/class/thermal/thermal_zone0/temp'
digT = []
digH = []
digP = []
t_fine = 0.0
def writeReg(reg_address, data):
bus.write_byte_data(i2c_address, reg_address, data)
def get_calib_param():
calib = []
for i in range(0x88, 0x88 + 24):
calib.append(bus.read_byte_data(i2c_address, i))
calib.append(bus.read_byte_data(i2c_address, 0xA1))
for i in range(0xE1, 0xE1 + 7):
calib.append(bus.read_byte_data(i2c_address, i))
digT.append((calib[1] << 8) | calib[0])
digT.append((calib[3] << 8) | calib[2])
digT.append((calib[5] << 8) | calib[4])
digP.append((calib[7] << 8) | calib[6])
digP.append((calib[9] << 8) | calib[8])
digP.append((calib[11] << 8) | calib[10])
digP.append((calib[13] << 8) | calib[12])
digP.append((calib[15] << 8) | calib[14])
digP.append((calib[17] << 8) | calib[16])
digP.append((calib[19] << 8) | calib[18])
digP.append((calib[21] << 8) | calib[20])
digP.append((calib[23] << 8) | calib[22])
digH.append(calib[24])
digH.append((calib[26] << 8) | calib[25])
digH.append(calib[27])
digH.append((calib[28] << 4) | (0x0F & calib[29]))
digH.append((calib[30] << 4) | ((calib[29] >> 4) & 0x0F))
digH.append(calib[31])
for i in range(1, 2):
if digT[i] & 0x8000:
digT[i] = (-digT[i] ^ 0xFFFF) + 1
for i in range(1, 8):
if digP[i] & 0x8000:
digP[i] = (-digP[i] ^ 0xFFFF) + 1
for i in range(0, 6):
if digH[i] & 0x8000:
digH[i] = (-digH[i] ^ 0xFFFF) + 1
def readData():
data = []
for i in range(0xF7, 0xF7 + 8):
data.append(bus.read_byte_data(i2c_address, i))
pres_raw = (data[0] << 12) | (data[1] << 4) | (data[2] >> 4)
temp_raw = (data[3] << 12) | (data[4] << 4) | (data[5] >> 4)
hum_raw = (data[6] << 8) | data[7]
outstring = "{ \"place\": \"home\" ,"
outstring += " \"time\": \"{}\" , ".format(
datetime.datetime.utcnow().strftime("%Y-%m-%dT%H:%M:%SZ"))
print(outstring, end="")
with open(path) as f:
tcpu = float(f.read()) / 1000.0
print("\"cpu\": {:.1f} ,".format(tcpu), end='')
compensate_T(temp_raw)
compensate_H(hum_raw)
compensate_P(pres_raw)
def compensate_P(adc_P):
global t_fine
v1 = (t_fine / 2.0) - 64000.0
v2 = (((v1 / 4.0) * (v1 / 4.0)) / 2048) * digP[5]
v2 = v2 + ((v1 * digP[4]) * 2.0)
v2 = (v2 / 4.0) + (digP[3] * 65536.0)
v1 = (((digP[2] * (((v1 / 4.0) * (v1 / 4.0)) / 8192)) / 8) +
((digP[1] * v1) / 2.0)) / 262144
v1 = ((32768 + v1) * digP[0]) / 32768
if v1 == 0:
return 0
pressure = ((1048576 - adc_P) - (v2 / 4096)) * 3125
if pressure < 0x80000000:
pressure = (pressure * 2.0) / v1
else:
pressure = (pressure / v1) * 2
v1 = (digP[8] * (((pressure / 8.0) * (pressure / 8.0)) / 8192.0)) / 4096
v2 = ((pressure / 4.0) * digP[7]) / 8192.0
pressure = pressure + ((v1 + v2 + digP[6]) / 16.0)
print(" \"pressure\": {:.1f} ".format(pressure / 100) + "}")
def compensate_T(adc_T):
global t_fine
v1 = (adc_T / 16384.0 - digT[0] / 1024.0) * digT[1]
v2 = (adc_T / 131072.0 - digT[0] / 8192.0) * \
(adc_T / 131072.0 - digT[0] / 8192.0) * digT[2]
t_fine = v1 + v2
temperature = t_fine / 5120.0
print("\"temp\": {:.1f} ,".format(temperature), end='')
def compensate_H(adc_H):
global t_fine
var_h = t_fine - 76800.0
if var_h != 0:
var_h = (adc_H - (digH[3] * 64.0 + digH[4] / 16384.0 * var_h)) * (digH[1] / 65536.0 * (
1.0 + digH[5] / 67108864.0 * var_h * (1.0 + digH[2] / 67108864.0 * var_h)))
else:
return 0
var_h = var_h * (1.0 - digH[0] * var_h / 524288.0)
if var_h > 100.0:
var_h = 100.0
elif var_h < 0.0:
var_h = 0.0
print(" \"humid\": {:.1f} ,".format(var_h), end='')
def setup():
osrs_t = 1 # Temperature oversampling x 1
osrs_p = 1 # Pressure oversampling x 1
osrs_h = 1 # Humidity oversampling x 1
mode = 3 # Normal mode
t_sb = 5 # Tstandby 1000ms
filter = 0 # Filter off
spi3w_en = 0 # 3-wire SPI Disable
ctrl_meas_reg = (osrs_t << 5) | (osrs_p << 2) | mode
config_reg = (t_sb << 5) | (filter << 2) | spi3w_en
ctrl_hum_reg = osrs_h
writeReg(0xF2, ctrl_hum_reg)
writeReg(0xF4, ctrl_meas_reg)
writeReg(0xF5, config_reg)
setup()
get_calib_param()
if __name__ == '__main__':
try:
readData()
except KeyboardInterrupt:
pass[/code]
{ place: "home" , time: "2020-08-02T12:33:42Z" , "cpu": 42.4 ,"temp": 33.2 , "humid": 56.7 , "pressure": 1013.9 }
# apt install python3-smbus python3-pip# python3 -m pip install apds9960# python3 -m pip install RPi.GPIO
[code]#!/usr/bin/python3
from apds9960.const import *
from apds9960 import APDS9960
import RPi.GPIO as GPIO
import smbus
import datetime, time
from time import sleep
port = 1
bus = smbus.SMBus(port)
apds = APDS9960(bus)
def intH(channel):
print()
GPIO.setmode(GPIO.BOARD)
GPIO.setup(7, GPIO.IN)
try:
# Interrupt-Event hinzufuegen, steigende Flanke
GPIO.add_event_detect(7, GPIO.FALLING, callback = intH)
apds.enableLightSensor()sleep(1)
outstring = "{ place : \"home\" ,"
outstring += " time : \"{}\" ,".format(datetime.datetime.utcnow().strftime(
"%Y-%m-%dT%H:%M:%SZ"))
outstring += " AmbientLight : {} ,".format(apds.readAmbientLight())
outstring += " red :{} ,".format(apds.readRedLight())
outstring += " green :{} ,".format(apds.readGreenLight())
outstring += " blue :{} ".format(apds.readBlueLight()) + "}"
print(outstring)
finally:
GPIO.cleanup()[/code]
{ place : "home" , time : "2020-08-02T11:58:17Z" , "AmbientLight" : 151 , "red" :33 , "green" :28 , "blue" :26 }
#正確には、APDS9660モジュールは秋月のものではなく、同等品。

0 1 2 3 4 5 6 7 8 9 a b c d e f
00: -- -- -- -- -- -- -- -- -- -- -- -- --
10: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
20: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
30: -- -- -- -- -- -- -- -- -- 39 -- -- -- -- -- --
40: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
50: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
60: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
70: -- -- -- -- -- -- 76 --